Philipp WuTwitter | Github | Scholar | LinkedIn I am a Ph.D. student at UC Berkeley advised by Professor Pieter Abbeel. I am interested in enabling general real world robots. My research falls at the intersection of reinforcement learning, unsupervised learning, and robotics. You can reach me at my email: phil80301[at]berkeley[dot]edu |

|
Papers
|
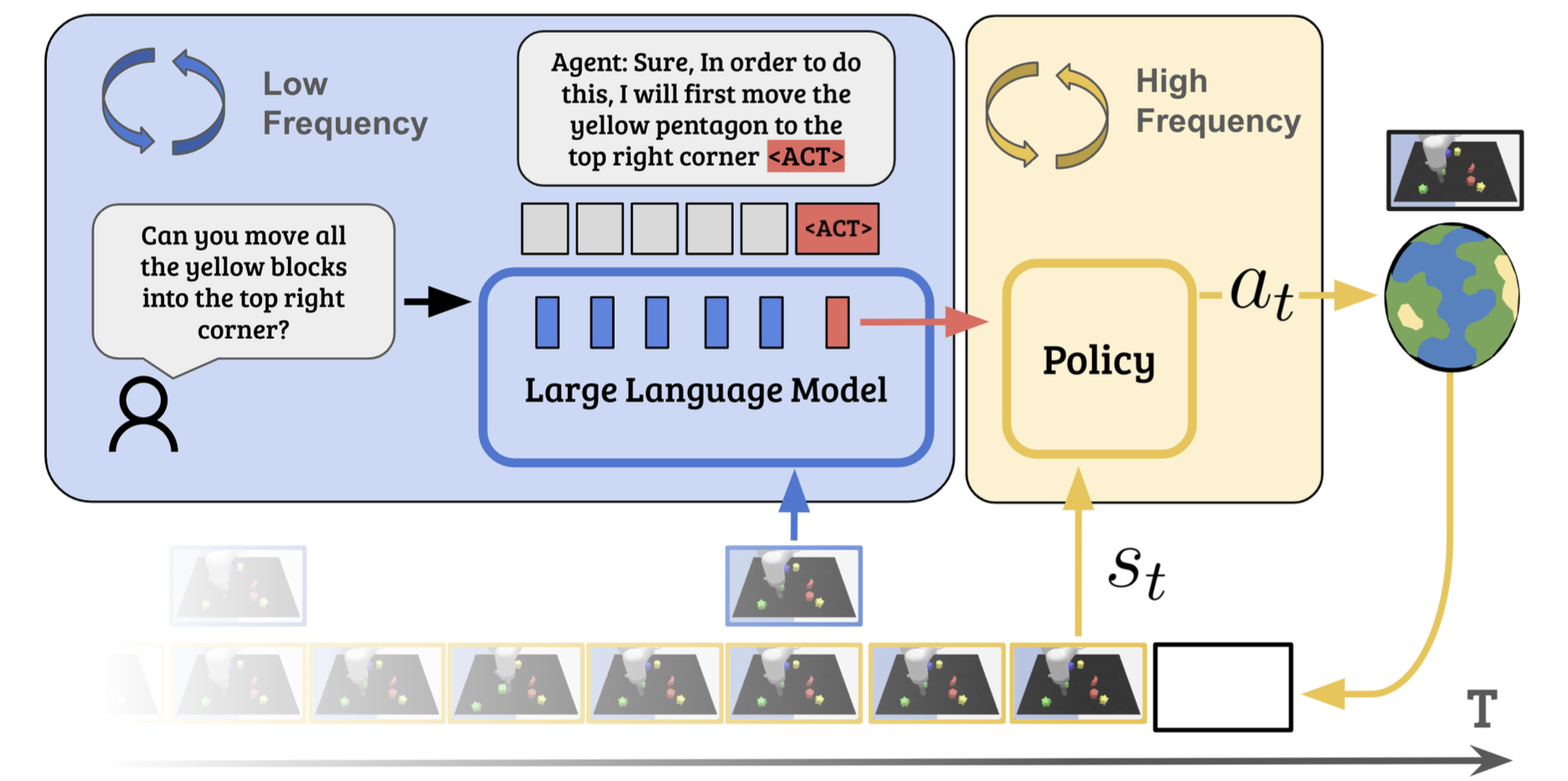
From LLMs to Actions: Latent Codes as Bridges in Hierarchical Robot Control
Preprint website | tweet |
|
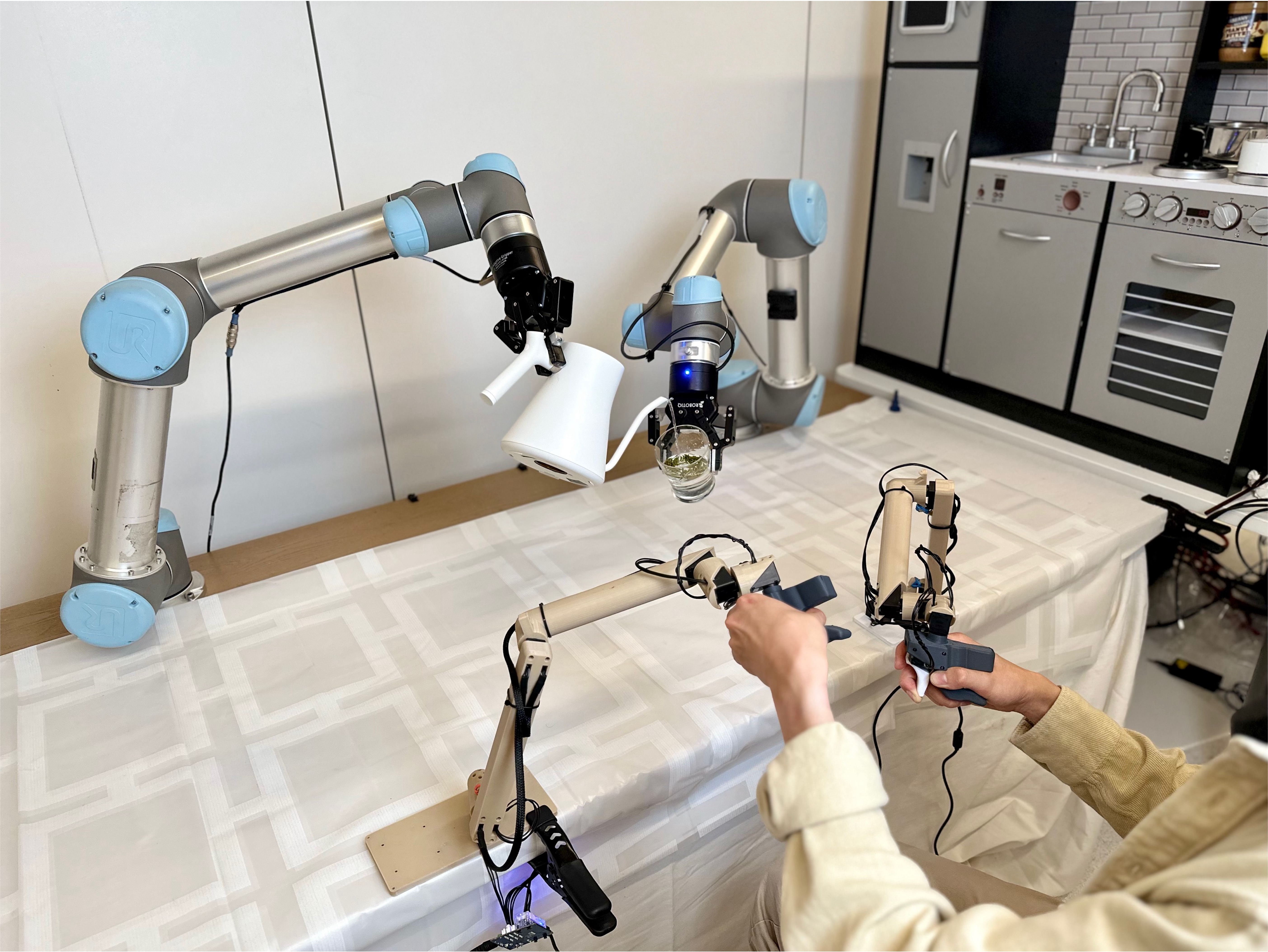
GELLO: A General, Low-Cost, and Intuitive Teleoperation Framework for Robot Manipulators.
Preprint paper | website | tweet |

|
Interactive Task Planning with Language Models
Preprint paper | website | tweet |
|
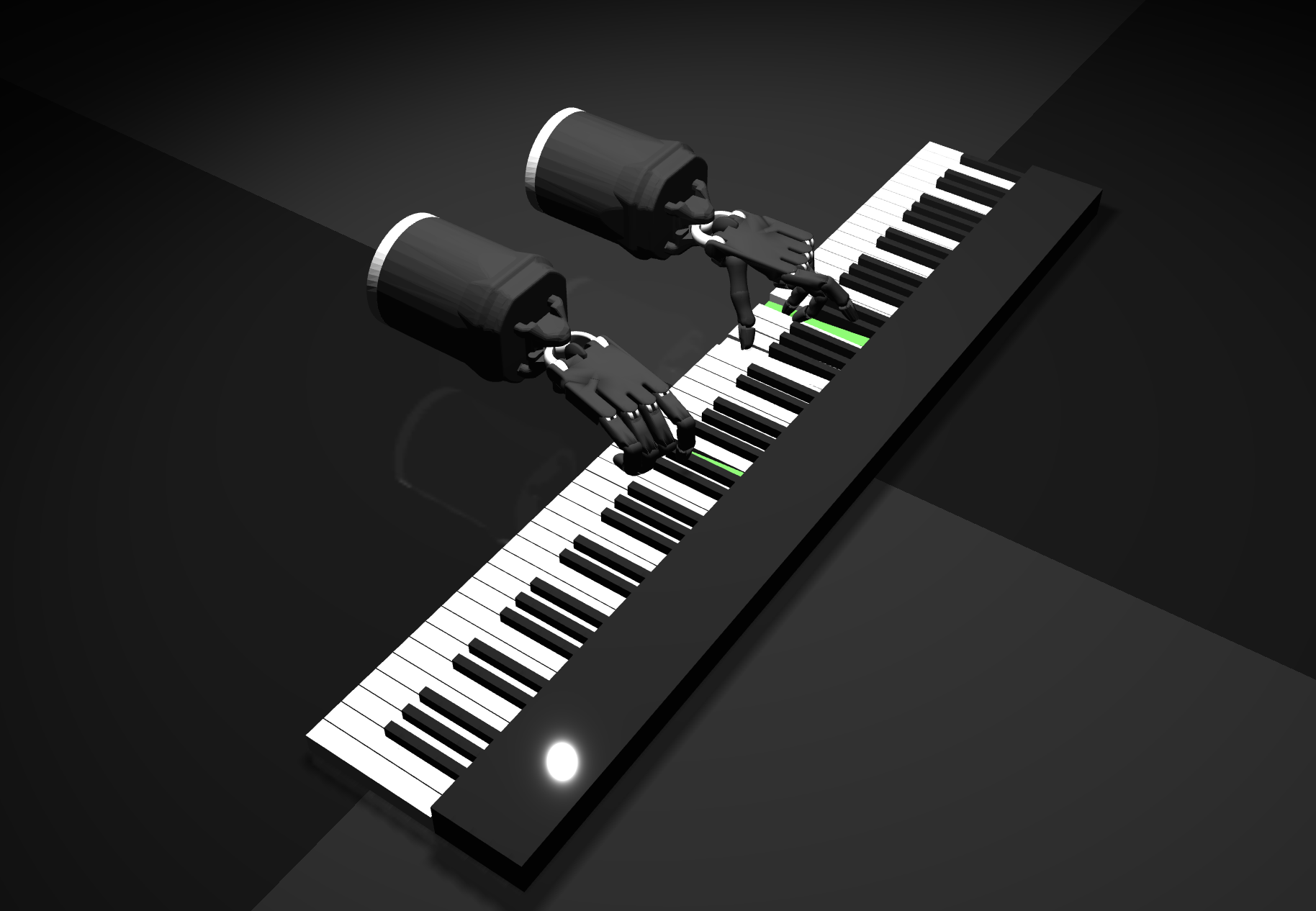
RoboPianist: Dexterous Piano Playing with Deep Reinforcement Learning
CORL 2023 paper | website | tweet |
|
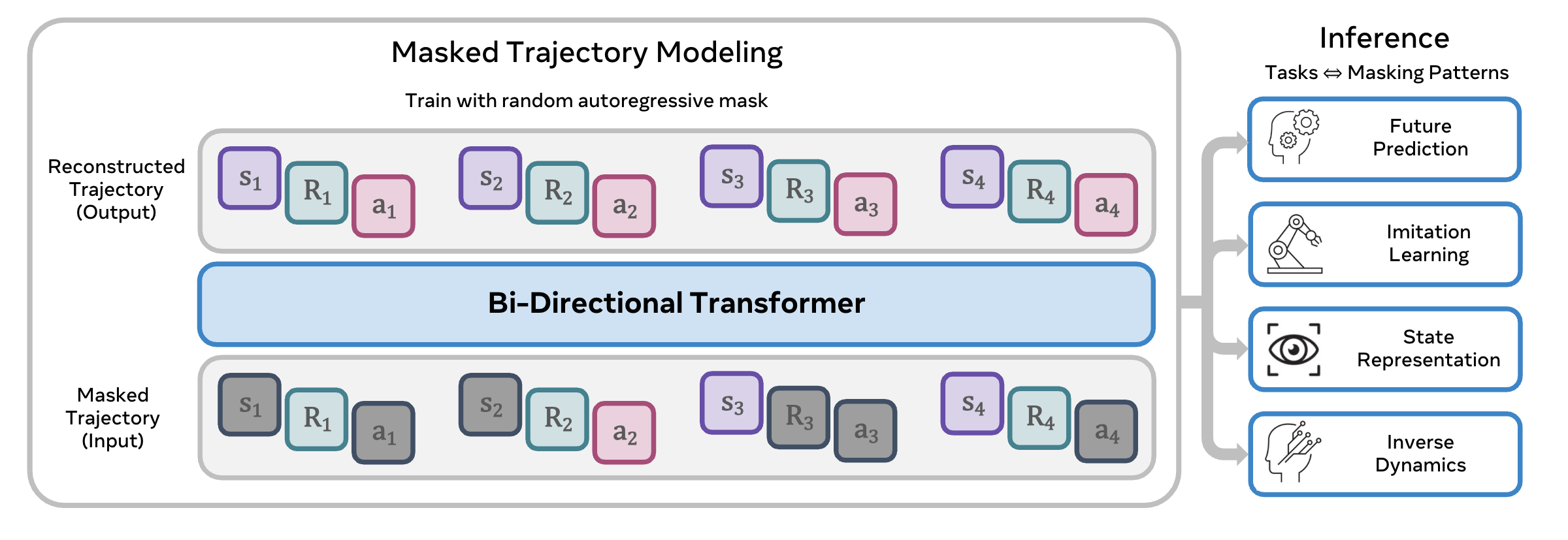
Masked Trajectory Models for Prediction, Representation, and Control. (ICML 2023)
ICML 2023 paper | website | tweet |
|
DayDreamer: World Models for Physical Robot Learning. (CoRL 2022)
CoRL 2022 paper | website | tweet |
|
|
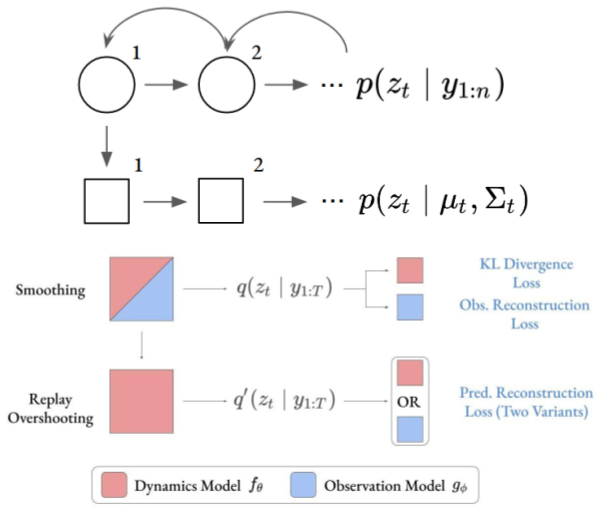
Replay Overshooting: Learning Stochastic Latent Dynamics with the Extended Kalman Filter.
ICRA 2021 paper |
|
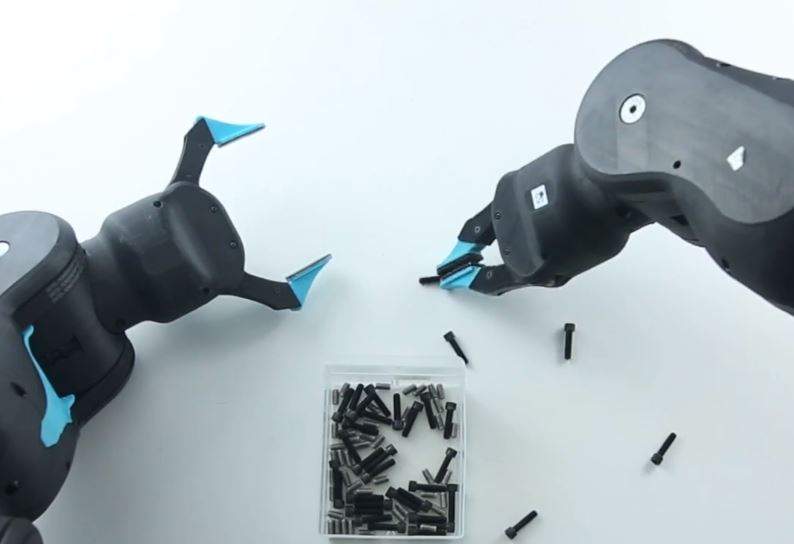
Robust and Low-Cost Gripper Design for AI-Based Robotic Manipulation.
CASE 2019 paper | website |
|
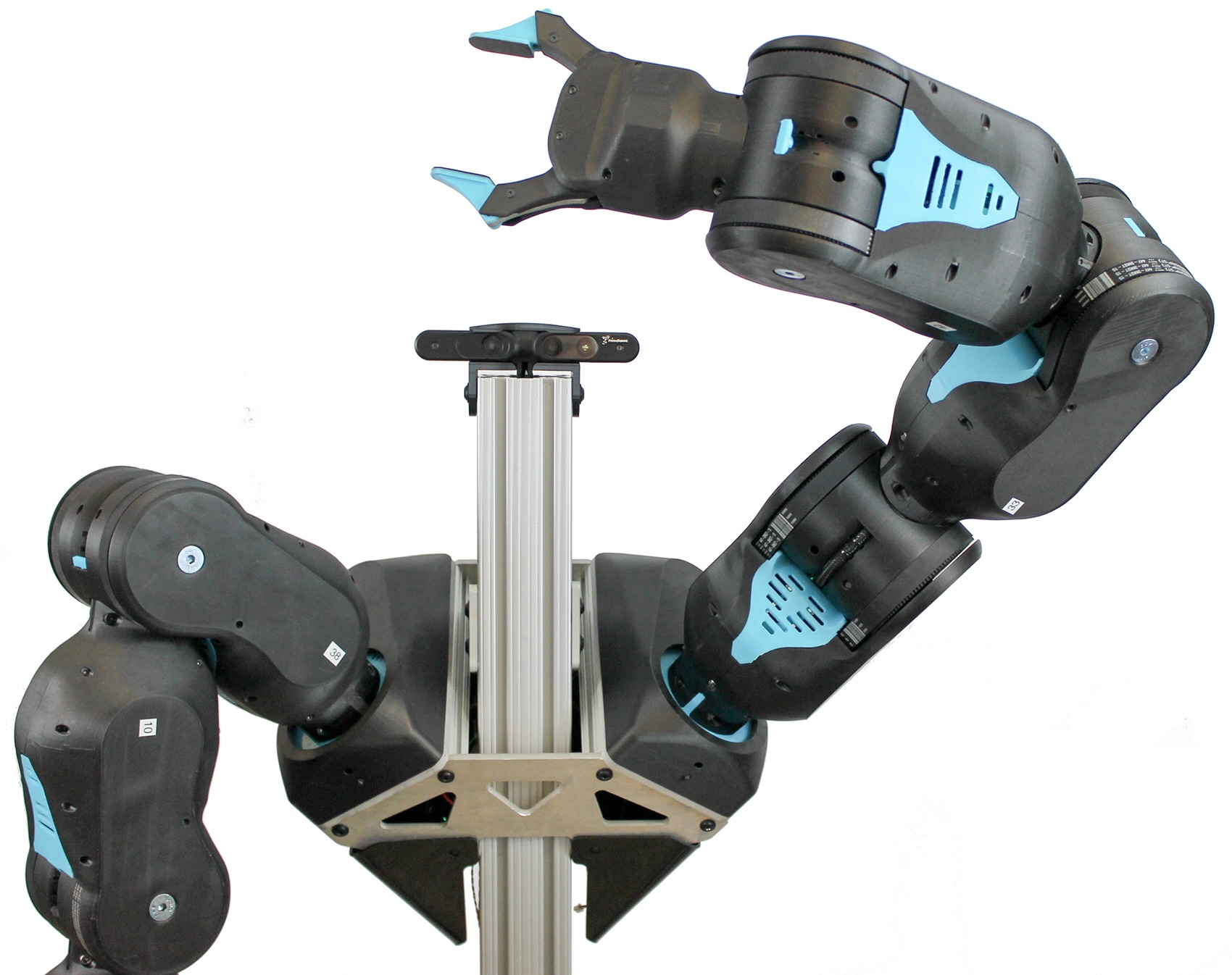
Quasi-Direct Drive for Low-Cost Compliant Robotic Manipulation.
ICRA 2019 paper | website |
Other
In undergrad I worked on the BLUE project, building and writing the contorl stack for low-cost robotic manipulators. For more information about out BLUE see our paper.